


Next: Class Distributions
Up: Continuous Weights Mixture Model
Previous: Non-spatial with Class Proportions
We can approximate the distribution in
equation 8 by replacing the discrete labels,
 , with continuous weights vectors,
, with continuous weights vectors,  :
:
 |
(14) |
where
 , is given by equation 10 with
, is given by equation 10 with
 where as before
where as before
 is specified by a
deterministic mapping between
is specified by a
deterministic mapping between
 and
and  (the
logistic transform, equation 12).
(the
logistic transform, equation 12).
However, instead of equation 11,
 is now a continuous Gaussian conditionally
specified auto-regressive (CAR) or continuous MRF
prior (Cressie, 1993) on each of the
is now a continuous Gaussian conditionally
specified auto-regressive (CAR) or continuous MRF
prior (Cressie, 1993) on each of the  class maps, i.e.
class maps, i.e.
 (where
(where
 } and
} and
 ) with:
) with:
 |
(15) |
where
 is an
is an
 matrix whose (i,j)th
element is
matrix whose (i,j)th
element is  ,
,
 , and
, and
 is
the MRF control parameter which controls the amount of spatial
regularisation. We set
is
the MRF control parameter which controls the amount of spatial
regularisation. We set  ,
,
 if
if  and
and
 are spatial neighbours and
are spatial neighbours and  otherwise (where
otherwise (where
 is the geometric mean of the number of neighbours for
voxels and ) , giving approximately:
is the geometric mean of the number of neighbours for
voxels and ) , giving approximately:
 |
(16) |
How does this posterior approximation using
the continuous class weights vectors instead of
class labels allow us to adaptively determine the amount of
spatial regularisation? The answer is that
 is a continuous random variable ranging
effectively between
is a continuous random variable ranging
effectively between  and
and  . Therefore,
unlike
. Therefore,
unlike  in
equation 6, the normalising
constant,
in
equation 6, the normalising
constant,
 , in
equation 16 is known:
, in
equation 16 is known:
 |
(17) |
and hence we can adaptively determine the MRF control parameter,
. To achieve this
becomes a
parameter in the model, and equation 14
becomes:
 |
(18) |
where the prior
 , is a non-informative
conjugate gamma prior:
, is a non-informative
conjugate gamma prior:
 |
(19) |
In summary, we have approximated the discrete labels with vectors
of continuous weights which a priori approximate delta functions
at 0 and 1. Each vector of continuous weights deterministically
corresponds (via the logistic transform) to another vector of
continuous weights, which a priori are uniform across the real
line. As they are uniform across the real line these vectors of
continuous weights can be regularised using a spatial prior (a
continuous MRF) for which the amount of spatial regularisation can
be determined adaptively.
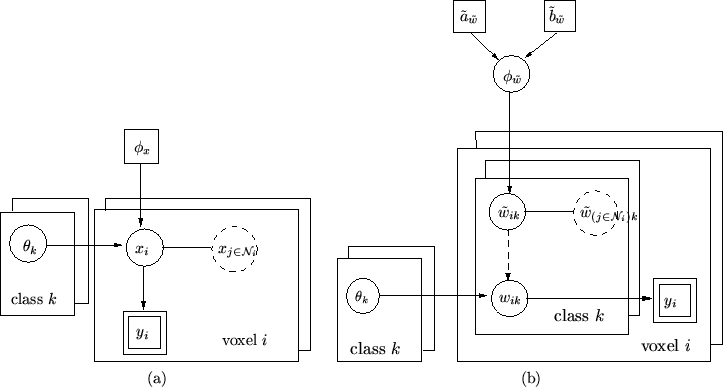
Figure 2 shows a graphical representation
of the discrete labels mixture model
(equation 8) and the continuous weights spatial
mixture model with adaptive spatial regularisation
(equation 14).
Figure 2:
Graphical representation of (a) the discrete labels
mixture model (equation 8), and (b) the
continuous weights spatial mixture model with adaptive spatial
regularisation (equation 14). Each
parameter is a node in the graph and direct links correspond to
direct dependencies. Solid links are probabilistic dependencies
and dashed arrows show deterministic functional relationships. A
rectangle denotes fixed quantities, a double rectangle indicates
observed data, and circles represent all unknown quantities.
Repetitive components are shown as stacked sheets. Dashed circles
represent nodes that really correspond to a different stacked
sheet, but which are shown on the top stacked sheet for ease of
display.
 |
Next: Class Distributions
Up: Continuous Weights Mixture Model
Previous: Non-spatial with Class Proportions